デパレ自動化ロボットシステム(ロボットメーカー:安川電機)
- 自動化
現状の問題
・袋状のワーク(25kg)を人手によりコンベアへ投入しており、重労働となっている。この為、増産体制が取れない。
・人員募集を掛けても集まらず、他の作業へ人手を使いたい。
・ワークをコンベア投入する際、巻き込み事故防止の安全性を確保したい。
導入検討課題
・ワークのつかみ取りが出来るか実証テストか必要。
・増産開始のスケジュールから約3か月での生産立ち上げ開始の短納期対応。
・客先よりタクトタイム(700袋/H)要求があり、事前検討現場でのティーチング補正対応が必要。
システム内容および改善内容
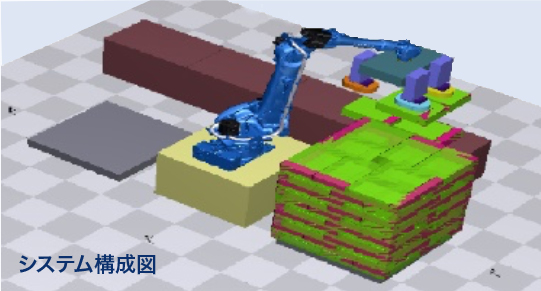
- 安川電機製 ハンドリングロボット:MOTOMAN-GP180+吸着パッド3つ付ハンド
- 袋状で重いワークに対応する経験が豊富にあり、客先要求を満たすハンド仕様(吸着パッドを3つ使用)を短期間で提案した。
- ハンド仕様の最終確定に際しては、2つの吸着ハンドメーカでテストを行い、ワークの破損なく、確実に吸着可能である最適な吸着パッドを選定した。(他社では爪型ハンドしかノウハウが無いため開発に1年要するとの回答のなか)
- 難度の高い現地でのティーチング補正(調整作業)に時間を割り当て、効率良くタクトタイムの短縮を実現した。
導入効果・メリット

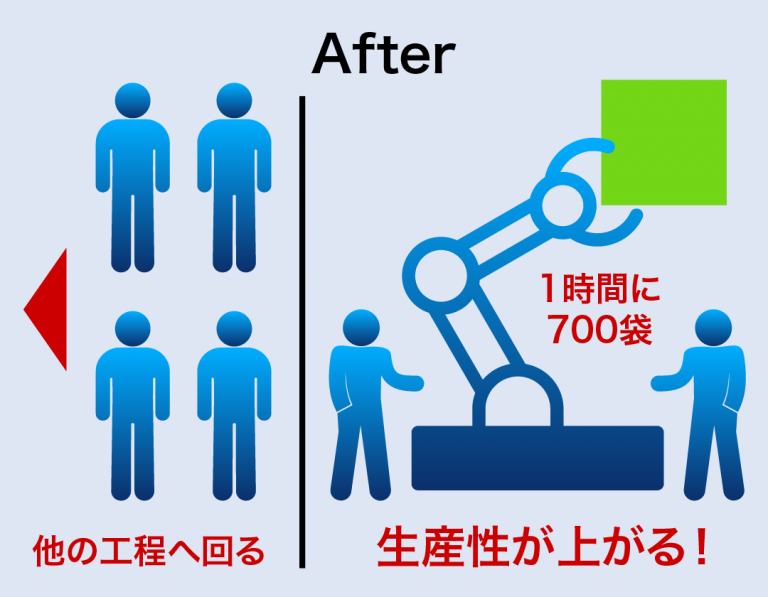
- 今回のデパレシステム導入により2名~4名の省人化。省人化により、どうしても人手でしか出来ない他の作業へ人員を回し、他工程の生産効率の改善も出来た。
- 重労働の為、人手では生産数の限界があったが、自動化により生産数を増やせ、増産体制への対応が出来た。
- 安全柵でコンベアを囲んでいる為、コンベア付近には人が近寄ることもないので、巻き込み事故の発生も無く、安全性が確保出来た。
導入期間
要件定義~実稼働まで 約3ヶ月