プレス間ハンドリングロボットシステム+ディスタッカ-
- 自動化
- 安全対策
- 見える化
現状の問題
・新工場設立にて省人化対策と生産効率の向上が必要。
・外国人労働者の割合が増え、操作の簡素化と安全性が必要。
・今後、スマート工場化に向けてIoTを活用したい。
導入検討課題
・現状のディスタッカ-・搬送ロボットシステムの改善点洗い出し。
・ロボット動作やタクトタイムの検証。
・建物やプレスなどの多数業者との兼ね合い確認。
システム内容および改善内容
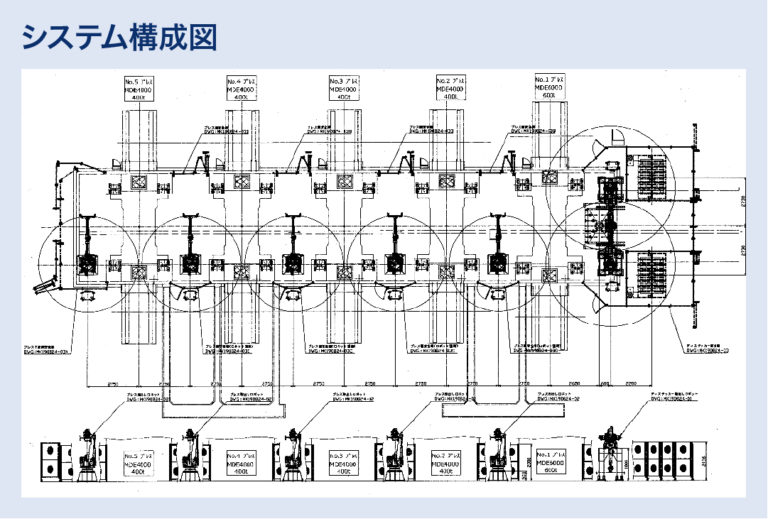
- ディスタッカ-(左右に各1台)・アイドルステージ(1台)、ワーク取り出し部ロボット(MOTOMAN-PH130RF×2台)、搬送部ロボット(MOTOMAN-PH130F×5台)にて、ユーザ殿の使用状況を落とし込み、ワークセッティングの簡素化とタクト改善。
- 操作性が簡素化され、外国人労働者のオペレーションミスが減少し、事故防止へも繋がっている。
導入効果・メリット
・プレス間ワーク搬送の作業者省人化と安全確保、操作ミスの減少。
・既設ラインに比べタクトタイム向上による生産効率アップ。
・YASKWA Cockpit にて生産状況を可視化し、外国人労働者への生産状況把握させる教育ツールとしても役立つ。
導入期間
約5か月